A Robotics Developer
Introducing
A robotics software developer passionate about building autonomous systems that can see, move, and interact with the world.
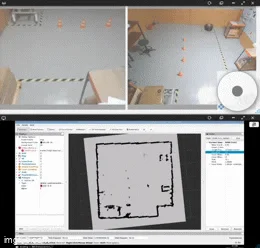
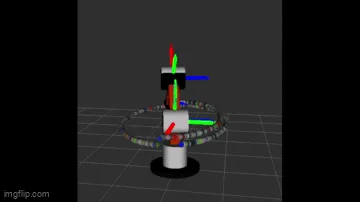
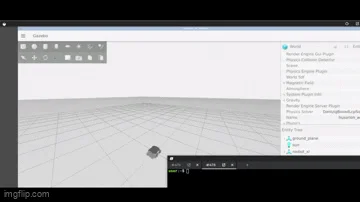
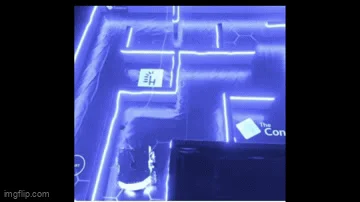
Projects




.jpeg)







.jpeg)